为什么双目自动驾驶系统难以普及技术详解+典型案例分析( 二 )
3)时域传播:前后帧考虑对应像素的估计;
4)平面细化:随机产生样本 , 如果估计使匹配成本下降 , 更新 。
5)后处理:左右一致性和加权中值滤波器去除出格点 。
在线标定
再说在线标定 。
这是一个利用路上标志线的标定方法:已知斑马线的平行线模式 , 检测斑马线并提取角点 , 计算斑马线模式和路面实现匹配的单映性变换参数 , 得到标定参数 。 文章插图
文章插图
和单目方法类似 , 采用车道线平行和路平面这个假设可以快速完成在线标定 , 即消失点理论:假设一个平坦的道路模型 , 清晰的纵向车道线 , 没有其他目标的边缘和它们平行;要求驾驶车辆速度慢 , 车道线连续 , 左右相机的双目配置要左摄像头相对路面的仰角/斜角比较小;这样跟初始化的消失点比较可以算出双目外参数的漂移量 , 其算法就是从消失点估计摄像头仰角/斜角 。 文章插图
文章插图
典型的双目自动驾驶系统
下面介绍几个典型的双目自动驾驶系统 。 文章插图
文章插图
这是他们加上深度学习做视差融合之后再做Stixel的框图和新结果: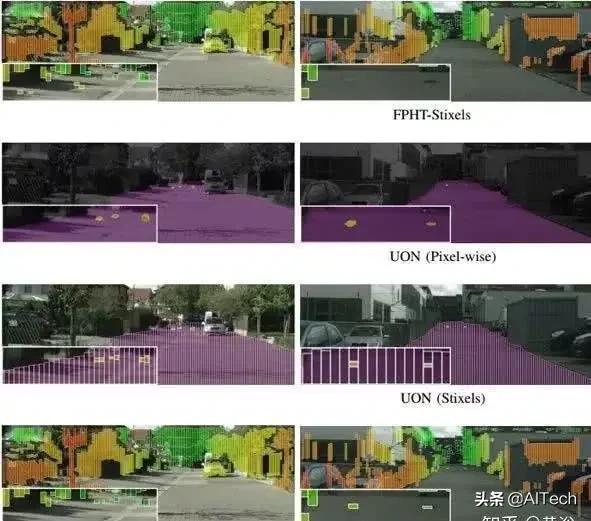 文章插图
文章插图
介绍一个VisLab早期双目障碍物的算法 , GenericObstacleandLaneDetectionsystem 。 基于IPM , 检测车道线 , 根据左右图像的差计算路上障碍物:
a)Left.RightRemappedleft.Remappedright.Thresholdedandfiltereddifferencebetweenremappedviews.Inlightgray,theroadareavisiblefrombothcameras.
a)Original.Remapped.Filtered.Enhanced.Binarized.
GOLDsystemarchitecture
这是VisLab参加自动驾驶比赛VIAC的车辆 , 除了双目摄像头以外 , 车上还有激光雷达作为道路分类的辅助 。 文章插图
文章插图
后处理中加了两个DSI空间的滤波器 , 见图5-274 , 一个是平滑处理 , 另一个是基于惯导的运动轨迹处理 。
障碍物检测算法采用了JPL的方法 , 基于空间布置特性以及车辆的物理特性聚类得到障碍物 。 物理特性包括最大的高度 , 最小高度和最大道路可通过范围 , 这些约束定义了一个空间截断锥,如图所示 , 那么在聚类过程中凡是落在截断锥内的点划为障碍物 。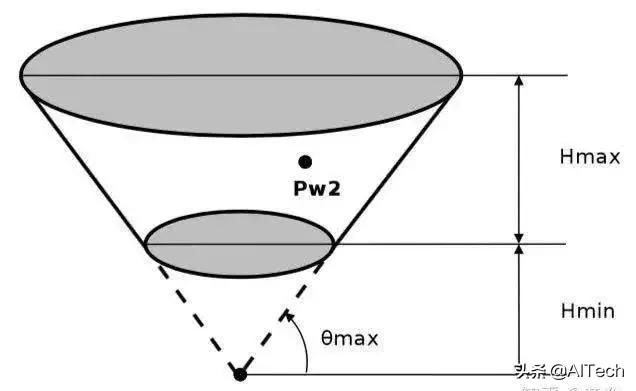 文章插图
文章插图
为加速视差估计算法 , 采用了划分DSI的方法:
另外一种经典的方法是根据路面方程得到路面视差 , 基于此计算出路面的障碍物 。
总结
总的看 , 双目检测障碍物的方法基本基于视差图 , 基于路面视差的方法较多 。 也许随着深度学习发展的突飞猛进 , 加上计算平台的增强 , 双目自动驾驶系统也会普及起来 。
本文来源:无人驾驶视界
本文仅作学术分享 , 著作权归作者所有 , 如有侵权 , 请联系后台作删文处理 。
- 看不上|为什么还有用户看不上华为Mate40系列来看看内行人怎么说
- 自动|碳博士控股子公司推出最新款自动驾驶清扫车
- 自动驾驶汽车|海外|自动驾驶无法可依?美国多个团体联合发布自动驾驶立法大纲
- 制药领域|为什么AI制药这么火,为什么是现在?
- 手机壳里头|为什么要在手机壳里面夹钱?10个有9个不懂,我才知道大有讲究
- 短视频|全球最火APP?抖音爆火背后离不开这几剂“猛药”为什么抖音能够这么火?
- 电商快递|包邮不香吗,为什么还有人加49元让小哥穿西装专车送快递?
- 团队|为什么项目管理非常重要?
- 猫腻|为什么拼多多上商品价格那么便宜还包邮?有什么猫腻?看完明白了
- 自动驾驶|市工信局欧阳全局长带队考察羊城晚报创意园和中国电研威凯基地