一种用于三维物体建模的精确、鲁棒的距离图像配准算法( 二 )
 文章插图
文章插图
特征匹配和分别为网格的两组RoPS特征和 。 对于来自的特征 , 可以找出与其最近的特征来自: 文章插图
文章插图
这一对被认为是对应特征 , 它们的关联点被认为是一个点对应 。 对于给定的 , 中可能有多个最接近的特征 。 在这种情况下 , 可以为特征生成多个对应点 , 本文使用k-d树算法降低特征匹配的计算复杂度 。 中的所有特征都与这些特征进行匹配 , 在中 , 得到一组点对应 , 对于每个点对 , 刚性变换可以使用点来计算位置和LRFs , 也就是: 文章插图
文章插图
鲁棒变换估计让作为网格对和的点对应集 , 是基于点对应的估计变换 。 对于每个估计的转换 , 会找出点对应的估计变换与相似 。 具体地说 , 首先转换每个旋转矩阵变换成三个欧拉角 , 然后用欧拉角之间的距离da和平移之间的距离dt来测量任意两个变换之间的差值向量 。 这个变换 , 它的角度距离da到小于a和平移距离的阈值dt, 当k小于一个阈值时 , 选择该阈值形成一组一致的对应关系 。
精细配准一旦确定了初始变换 , 就使用ICP算法的一种变体来进行精细配准 。 从初始变换开始 , ICP算法迭代细化通过在两个网格中反复生成最近点对和最小化残差的刚性变换误差 。 这种变异与最初的不同ICP算法的几个方面 。 首先 , 采用由粗到细的抽样方法来提高其计算能力效率 , 而不是使用所有的点来搜索他们的最近点在 , 只取一部分第m次迭代时的点 。 由于基于随机子抽样和均匀子抽样的ICP算法有一个非常相似的配准性能 。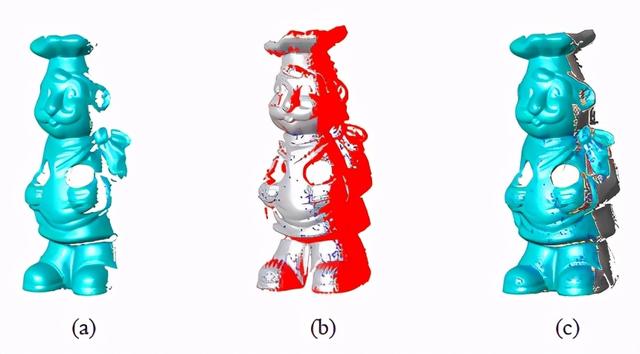 文章插图
文章插图
图2 形状成长过程的图解 。 (a)种子的形状 。 (b)输入网格 , 其中红色点表示将要被更新到种子形状的点 。 (c)更新后的形状 。 蓝色的点表示输入网格和更新后的形状之间的对应点(最好以颜色显示) 。
参考文献[1] P. Besl and N. McKay, “A method for registration of 3-D shapes,” IEEE Transactions on Pattern Analysis and Machine Intelligence,vol. 14, no. 2, pp. 239–256, 1992.
[2] R. Benjemaa and F. Schmitt, “A solution for the registration of multiple 3D point sets using unit quaternions,” in European Conference on Computer Vision. Springer, 1998, pp. 34–50.
[3] P. J. Neugebauer, “Reconstruction of real-world objects via simultaneous registration and robust combination of multiple range images,” International Journal of Shape Modeling, vol. 3, no. 01n02, pp. 71–90, 1997.
[4] J. Williams and M. Bennamoun, “Simultaneous registration of multiple corresponding point sets,” Computer Vision and Image Understanding, vol. 81, no. 1, pp. 117–142, 2001.
[5] Y. Guo, M. Bennamoun, F. Sohel, M. Lu, and J. Wan, “3D object recognition in cluttered scenes with local surface features: A survey,”IEEE Transactions on Pattern Analysis and Machine Intelligence. In press, 2014.
本文仅做学术分享 , 如有侵权 , 请联系删文 。
下载1
在「计算机视觉工坊」公众号后台回复:深度学习 , 即可下载深度学习算法、3D深度学习、深度学习框架、目标检测、GAN等相关内容近30本pdf书籍 。
下载2
在「计算机视觉工坊」公众号后台回复:计算机视觉 , 即可下载计算机视觉相关17本pdf书籍 , 包含计算机视觉算法、Python视觉实战、Opencv3.0学习等 。
下载3
在「计算机视觉工坊」公众号后台回复:SLAM , 即可下载独家SLAM相关视频课程 , 包含视觉SLAM、激光SLAM精品课程 。
- 优化|微软亚洲研究院发布开源平台“群策 MARO” 用于多智能体资源调度优化
- 换头像|从不换“头像”的人,多半都是这几张原因,你是哪一种?
- 输送|新时达:“用于机器人码垛的输送系统”获发明专利
- 公司|英联股份:“一种全自动易开盖冲压卷边注胶生产线”获发明专利证书
- 共享|快看,涟水街头又多了一种共享电动车
- 用于|用于半监督学习的图随机神经网络
- 挑战|德邦股份:社区团购是对传统电商的一种补充,对物流企业来说有机会也有挑战
- 工程|给海底隧道工程做三维“B超”的人
- 核磁共振|研发用于教研的核磁共振量子计算机,「量旋科技」还想在超导量子技术上取得突破
- 地面|莱茵金属公司推出,用于武装侦察的新型地面机器人