RobotStudio二次开发:Smart组件I/O信号声明
机器人I/O信号说明Smart组件是RobotStudio软件实现虚拟仿真必不可少的功能 , 它是机器人I/O信号对仿真对象运动属性控制的连接桥梁 。 由此可以看出 , Smart组件其实就是由I/O信号控制功能与仿真对象的属性配置两大核心功能构成 。
对于Smart组件的二次开发也是围绕着这两大核心功能 , 按照Smart组件的开发标准 , I/O信号与仿真对象属性的添加都是在*.xml文件中直接声明 。
本期 , 就先为大家介绍一下Smart组件I/O信号的声明方法 。
RobotStudio软件版本:RobotStudio 6.08
SDK版本:RobotStudio SDK.6.08
开发软件版本:Microsoft Visual Studio Professional 2019
项目创建首先搭建RobotStudio软件二次开发环境 , 然后使用RobotStudio SDK提供的Smart组件二次开发模板创建开发项目 , 详细操作步骤请查阅之前发布的文章《RobotStudio软件二次开发:基于C#语言的Smart组件开发基础》 。
I/O信号声明方法I/O信号是Smart组件与仿真环境进行通信的重要元素 。 在Smart组件二次开发技术中 , I/O信号的创建是通过在SmartComponent.xml文件中声明实现的 。
SmartComponent.xml文件主要用于在Smart组件中添加组件元素 , 如I/O信号、仿真对象属性等 。 使用Smart组件二次开发模板创建的开发项目 , SmartComponent.xml文件会自动生成 , 无需再次添加 。
二次开发能够声明的I/O信号均包含在IOSignal类中 , 并且信号类型可以在IOSignal Type成员中直接枚举 , 能够枚举的信号类型及机器人信号属性对应关系如下表所示 。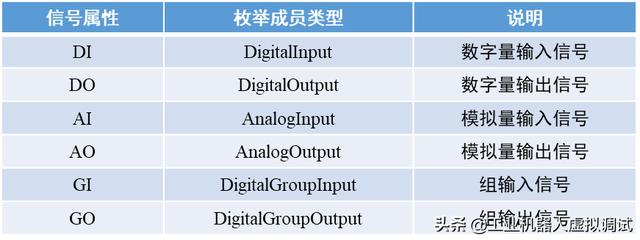 文章插图
文章插图
I/O信号是在SmartComponent.xml文件中的两个“”代码行之间声明的 , 信号声明代码语句格式如下所示 。
public IOSignal(string name, IOSignalType type)name:指定声明的I/O信号名称 , 类型为字符串(String) 。
Type:指定声明的I/O信号枚举成员类型 。
DI、DO、AI、AO、GI、GO类型信号均可声明 , 声明代码如下图红色方框所示 。 文章插图
文章插图
完整的I/O信号声明代码如下所示 。
 文章插图
文章插图
信号属性设置代码是在信号声明代码语句的枚举成员类型后直接编写添加的 , 如下图红色方框所示 。 本例中分别对I/O信号的自动重置、最大值、最小值、只读性、可见性、初始值属性进行编写说明 。 文章插图
文章插图
完整的I/O信号属性设置代码如下所示 。
- 推出|三星可能会推出一款名为“Galaxy Smart Tag”的追踪器
- 商标|三星申请SmartTag商标 或于2021年初发布智能追踪器
- 亮相|三星“Galaxy Smart Tag”追踪器曝光 有望与Galaxy S21一同亮相
- 发布|三星Smart Tag跟踪器已通过认证 或于明年1月发布
- 追踪|消息称三星正研发名为“Galaxy Smart Tag”的物体追踪器
- 三星申请SmartTag商标 或于2021年初发布智能追踪器
- Revit二次开发,已知ab直线求经过a点并垂直于ab的垂线
- 让安全常伴你左右,Smart4u骑士复古头盔上头体验
- 三星可能会推出一款名为Galaxy Smart Tag的智能物品追踪器
- Smartisan TNT go扩展本发布:手机秒变笔记本、全家桶8299元