ABB机器人二次开发:使用Web网页读取机器人系统信息的操作方法( 二 )
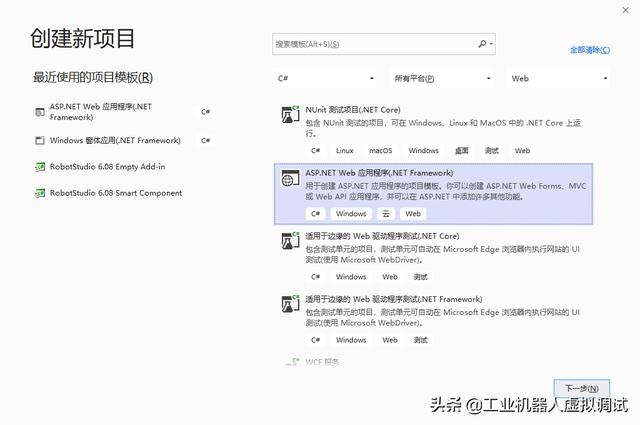
Web网页编写获得了Web网页接口返回信息后 , 就可以将其转换为Web网页了 。 在Microsoft Visual Studio软件中创建Web网页项目 , 项目模板选择“ASP.NET Web应用程序(.NET Framework)” 。
 文章插图
文章插图
配置新项目中 , 可以设置项目名称、位置、解决方案名称、框架版本等内容 。
 文章插图
文章插图
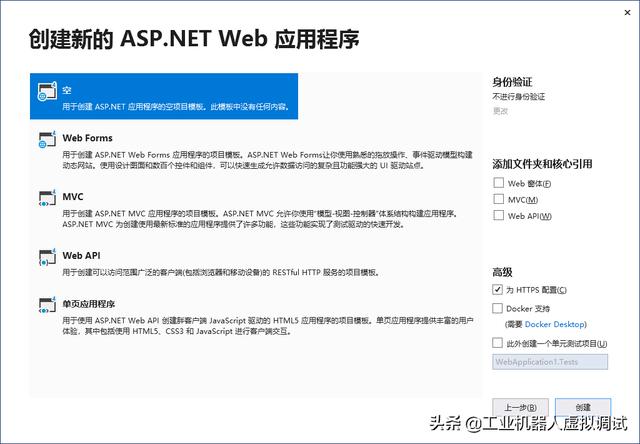
创建新的ASP.NET Web应用程序中选择“空” , 点击“创建”按钮 。
 文章插图
文章插图
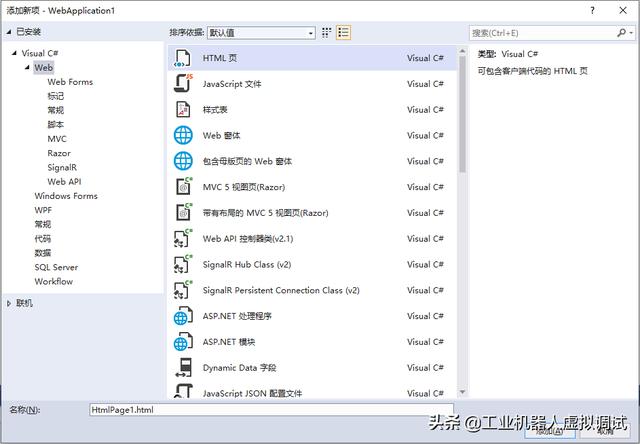
项目创建完成后 , 在软件右侧“解决方案资源管理器”中 , 右击项目名称 , 然后依次选择“添加”→“新建项” , 添加新项中选择“HTML页” 。
 文章插图
文章插图
HTML页添加完成后 , 参考Postman软件中测试的机器人系统信息获取接口返回的信息 , 将其转换为HTML网页获取机器人系统信息程序代码 。
 文章插图
文章插图
完整HTML网页获取机器人系统信息程序代码如下所示 。
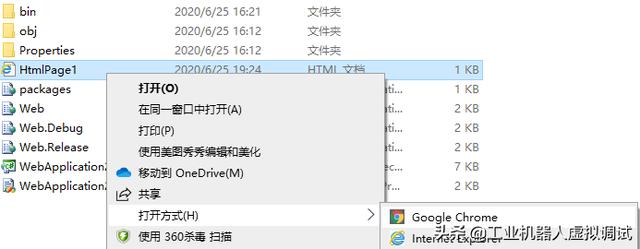
Web网页运行测试项目编译完成后 , 在项目根目录下可以找到编写的HTML网页文件HtmlPage1 。
 文章插图
文章插图
右击HTML网页文件HtmlPage1 , 打开方式选择为“Google Chrome” 。
 文章插图
文章插图
网页打开后 , 点击网页中的“点击读取”按钮 , 若是之前没有登录过机器人系统 , 则需要先登录机器人系统 , 用户名为Default User , 密码为robotics , 系统成功登录后即可获得机器人系统信息 , 测试效果如下方动态图所示 。
 文章插图
文章插图
真实机器人Web网页运行测试对于真实的机器人需要将编写好的HTML网页文件加载到机器人控制器中 , 如将其保存到Home中的docs文件夹中 , 然后在Google Chrome网页地址中输入/docs/ HtmlPage1.html , 就可以打开读取机器人系统信息的网页了 。 当然IP地址需要根据实际设置情况自行设置 , 并且HTML网页文件中的IP地址也要与之对应一致 。
The End
【ABB机器人二次开发:使用Web网页读取机器人系统信息的操作方法】上一篇:Robotstudio软件:ABB机器人机器视觉位姿引导虚拟仿真
文章插图配置新项目中 , 可以设置项目名称、位置、解决方案名称、框架版本等内容 。
文章插图创建新的ASP.NET Web应用程序中选择“空” , 点击“创建”按钮 。
文章插图项目创建完成后 , 在软件右侧“解决方案资源管理器”中 , 右击项目名称 , 然后依次选择“添加”→“新建项” , 添加新项中选择“HTML页” 。
文章插图HTML页添加完成后 , 参考Postman软件中测试的机器人系统信息获取接口返回的信息 , 将其转换为HTML网页获取机器人系统信息程序代码 。
文章插图完整HTML网页获取机器人系统信息程序代码如下所示 。
测试读取机器人系统信息当然 , 对于精通HTML网页编程的小伙伴 , 也可以使用记事本编写程序 , 并生成HTML网页 , 这里不再过多介绍 。Web网页运行测试项目编译完成后 , 在项目根目录下可以找到编写的HTML网页文件HtmlPage1 。
文章插图右击HTML网页文件HtmlPage1 , 打开方式选择为“Google Chrome” 。
文章插图网页打开后 , 点击网页中的“点击读取”按钮 , 若是之前没有登录过机器人系统 , 则需要先登录机器人系统 , 用户名为Default User , 密码为robotics , 系统成功登录后即可获得机器人系统信息 , 测试效果如下方动态图所示 。
文章插图真实机器人Web网页运行测试对于真实的机器人需要将编写好的HTML网页文件加载到机器人控制器中 , 如将其保存到Home中的docs文件夹中 , 然后在Google Chrome网页地址中输入/docs/ HtmlPage1.html , 就可以打开读取机器人系统信息的网页了 。 当然IP地址需要根据实际设置情况自行设置 , 并且HTML网页文件中的IP地址也要与之对应一致 。
The End
【ABB机器人二次开发:使用Web网页读取机器人系统信息的操作方法】上一篇:Robotstudio软件:ABB机器人机器视觉位姿引导虚拟仿真
- 机器人|网络里面的假消息忽悠了非常多的小喷子和小机器人
- 跑腿|机器人“小北”上岗 让办事群众少跑腿
- 机器人|外骨骼康复训练机器人助力下肢运动功能障碍患者康复训练
- 教学|机器人教学的目标方案
- 体验|VR\/AR体验、3D打印、机器人“对决”……松江这所中学人工智能创新实验室真的赞
- 输送|新时达:“用于机器人码垛的输送系统”获发明专利
- 顶级|内地高校凭磁性球体机器人首获机器人顶级会议最佳论文奖
- 康复|五莲县康复医院引进全省首台康复机器人
- 地面|莱茵金属公司推出,用于武装侦察的新型地面机器人
- ABB机器人如何与外部通信(devicenet设置)