相干:用于成型表面的 一种简单的自动化激光3D打标解决方案
江苏激光联盟导读:相干公司开发了一种用于成型表面的简单的自动化激光打标解决方案。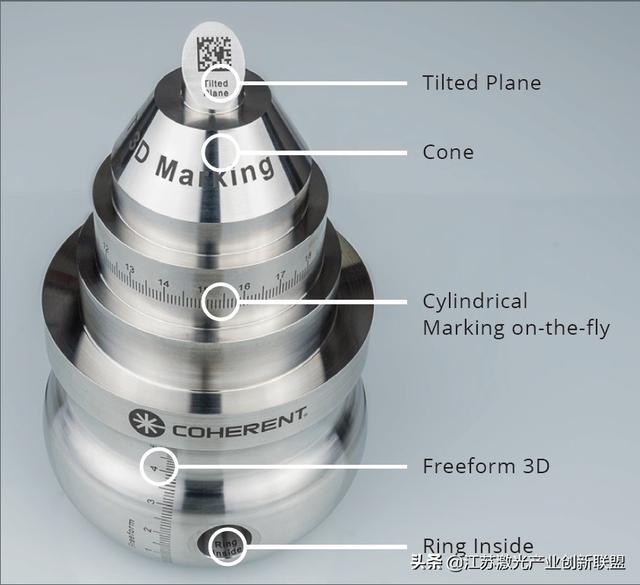 文章插图
文章插图
新的智能化方案使得打标可以在 几乎任何形状或 表面定向上实现 , 甚至在孔内和附加物中也可以实现打印
图解:这些案例是在不锈钢中利用相干的超短脉冲激光进行黑色标记法打标打出来的样品
不断增长的3D打标需求
激光打标市场被认为是不断增加的一个市场 , 在需要打标或者纹理非平面 的场合 , 如曲线、倾斜或者阶梯曲面 的表面以及自由成型的表面和凹面 。 非常遗憾地是 , 传统地激光打标和集成机器存在的缺陷是只能对平板的表面进行打标或者圆柱地表面通过旋转地方式或者在打标的过程中对部件进行移动的方式来实现打标 。 然而 , 目前现存地可以实现复杂形状表面地打标办法就是诉诸成本 和利用机器人或者复杂的5轴机器进行复杂的编程 。
但在现在 , 一种自动化的智能解决方案 , 称之为SmartMap 3D的打标方案 , 在相干公司问世 , 通过将新颖的硬件和软件结合在一起 , 尤其是一个业也证明的快速可变聚焦的办法 , 一个新颖的3D机器视觉 , 均在功能强大的打标软件的控制下进行(可视化激光打标) 。 这一技术不仅可以非常容易地将整个工艺进行简化 , 同时还减少了成本和对部件进行精密固定、装夹或移动所造成的时间和成本 。 软件同时也支持简单的打标应用 , 包括飞行打标 。 在本文中 , 我们为大家介绍了这一3D打标技术的主要特征和在成本-效益中的有益效果 , 在对子系统进行打标和整个设备进行打标时的效果 。 而且 , 由于激光类型的独立性 , SmartMap 3D 可以用来制造几乎各种不同类型的激光打标(如颜色的变化、雕刻)、对粗糙表面和结构化的表面的精密处理 , 甚至是采用超快脉冲激光在不锈钢上进行黑色的打标 , 见上图 。 如今相干公司已经拥有完整的的激光打标系统和整套的机器 。
激光打标——用途广泛 --tt-darkmode-color: #909090;">图2 (a) 传统的3D打标可在平面上实现
图解: (b) 适用 SmartMap 3D打标 , 聚焦偏移模块(focus shifter module (FFM))可以促使系统实现对靶区体积的打标
传统的打标是存在弊端的 , 智能实现2D的打标 , 要实现3D表面的打标 , 采用传统工艺只有采用机器人才比较方便一点 , 需要传输镜片 , 有时候甚至是整个激光子系统相对于工件表面移动和机器人进行移动 。 这是非常累赘复杂的、费钱的和需要复杂的编程 , 同时还需要同精确的复杂的图像输送进行斗争 。 而 SmartMap 3D则可以提供一个替代的解决方案 , 非常简单、快速和更经济的解决方案 , 这是因为这一系统不再需要光学系统或部件的移动 , 这主要得益于快速的光学系统中的聚焦模块 , 见图2b 。 这使得可以实现快速的聚焦长度的调整 。 结合两个扫描振镜在X方向和XY方向的扫描 , 提供了快速的定位聚焦激光在XYZ位置的定位 , 而不需要对点的尺寸和形状进行改变 。
SmartMap 3D – 系统整合了硬件、软件和3D机器视觉
对3D打标来说 , 另外一个关键的元素就是在可视化选择( Visual Laser Marker (VLM))激光中用户友好的软件选择 。 VLM可以自动地决定聚焦模块和扫描发射镜片依据特定工件进行移动 。 基于相干40多年的在激光打标应用经验 , 该软件定义工件表面 , 然后储存起来用以每一工作类型的需要 。 用户只需要对工件表面利用直觉GUI控制 。 这一打标的细节可以利用两个常用的3D表面地图类型来生成和储存 。 大多数直觉的办法称之为投影地图 , 此时的打标被定定义为一系列矢量上的点 , 同固定的相对的的视觉点相对应 。 对于常用的固体 , 如球形、圆锥形和立方体 , VLM均可以创建出UV地图来 。 在这里 , 打标是基于一系列的被定义的2D平面分割的角坐标系来实现的 。 这就使得利用现有的打标文件如pdf和dxf文件均科适用 , 同时支撑柔性的内容 , 如QR代码、Barcode代码和相关的打标软件 。 不同的算法地图分割成工件表面真实的xyz 坐标系 。 对于特殊复杂的工件表面或图形 , 更复杂的用户则可以输入CAD数据软件和进行在VLM中进行编辑 。 大多数商业化的CAD 平台均会提供这一输入格式 。
3D视觉可以使得VLM能够同时提供完全的精确的预览要打标的部件所将呈现的形态 。 并且帮助放置图形、以错误色来视觉化剪切角 , 甚至设置机器轴的移动 , 所有这些均在预览窗口完成 。
该 SmartMap 3D打标系统的第三个部件是硬件 , 机器视觉线性相机 , 可以在打标之前扫描部件的每一部分 。 这是两个不同的波长来适应任何可以打标材料的反射和颜色 。 整合视觉部件可以允许智能打标软件来探测打标前部件的形状和方位 , 一个三维的点云 。 这些结果同储存的特定物体的CAD模型文件来对比 。 对匹配度进行打分 , 以百分制来评价 。 GUI则选择性的显示相机图片的匹配程度 。 这可以最小限度的满足可以接受的这一打标参数的选择 。 可以替代的 , 基于GUI预览 , 操作者可以决定是否需要开始打标或调整工件的位置和方向以保证得到好的匹配度 。 点云可以转换CAD表面和直接在VLM中应用 , 这样在没有CAD模型进行对比的时候也可以使用 。 这样就可以使得打标不需要进行精确的定位和固定 。
- 优化|微软亚洲研究院发布开源平台“群策 MARO” 用于多智能体资源调度优化
- 输送|新时达:“用于机器人码垛的输送系统”获发明专利
- 用于|用于半监督学习的图随机神经网络
- 核磁共振|研发用于教研的核磁共振量子计算机,「量旋科技」还想在超导量子技术上取得突破
- 地面|莱茵金属公司推出,用于武装侦察的新型地面机器人
- 梯度直方图(HOG)用于图像多分类和图像推荐
- 前沿研究丨用于智能维护的大数据调度和全球标准方法
- 故障|用于管理和故障排除的云自动化用例
- 人体|用于单目3D人体姿态估计的局部连接网络,克服图卷积网络限制
- 好消息中国“量子芯片”技术取得突破,或用于手机生产