操作|创新,给消化内镜添个好帮“手”
● 转化之星
与外科手术相比 , 消化内镜下的微创介入治疗具有操作相对简便、创伤性小、可重复性强等优点 , 改变了当今的医疗格局 。 介入治疗的进步依赖于消化内镜的不断改进 , 最近北京大学第三医院消化科团队把他们的工具改进了一些 , 并且在医院的支持下 , 已经进入转化阶段 。
文章图片
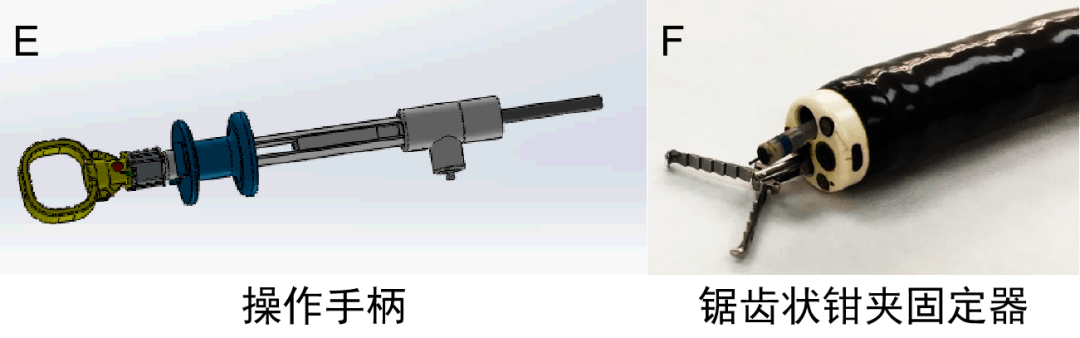
电动组织把持钳手柄上有控制开关和微型驱动电机 , 在微型电机的驱动下 , 手柄内部的可旋转轴规律旋转 , 并带动头端的锯齿状钳夹固定器旋转 , 从而使钳夹在固定器上的目标组织按照术者需要转动 。
内镜下治疗常会“看不清”
内镜下黏膜剥离术(ESD)2001年开始在日本发展和传播 , 目前广泛应用于食管、胃、结肠早期肿瘤及癌前病变的内镜下治疗 。 经典的ESD技术是向黏膜下注射生理盐水使肿瘤隆起并与黏膜下分离,再延黏膜下层完整剥离整个病变 。 ESD既可以整片切除大面积的黏膜病变;又可获取完整的早期癌标本供病理研究;同时可以准确判断病变的浸润深度、有无病变边缘肿瘤残留 , 指导后续治疗 。
然而在临床实践过程中 , 黏膜下剥离操作难度很大 , 已经剥离的病变会随着重力作用自然下垂 , 遮挡视野 , 为了满意暴露视野及未剥离的病变 , 会显著延长ESD操作时间 。 而一旦在视野不满意时盲目操作 , 又极易造成出血、穿孔等严重的并发症 。 因此 , 如何在操作中满意地抬起已剥离病变 , 使未处理病变清晰暴露 , 是ESD操作的难点 , 也是决定术后并发症发生率、手术时间等的关键步骤 。
为临床需求萌生研发思路
传统方法中 , 透明塑料制成的圆管状“透明帽”可以起到一定的抬起病变作用 。 但实际操作中 , 黏膜下层暴露并不满意 , 此外由于透明帽的阻隔 , 有些部位操作器械很难靠近 , 特别是肠ESD中 , 会显著延长ESD操作时间 , 并增加并发症发生率 。 有没有一种辅助设备 , 可以像“手”一样 , 随心所欲地提起想要切除的目标组织 , 充分满意暴露黏膜下层 , 降低手术难度呢?
在国家自然科学基金、北京市科学技术委员会首都特色临床研究等基金的支持下 , 为解决临床操作中的实际问题 , 北京大学第三医院北方院区执行院长、北京大学第三医院消化科副主任、内镜中心主任黄永辉教授率领团队 , 创新性研发了“电动组织把持钳” 。
新产品让操作更“随心所欲”
为了明确电动组织把持钳是否能助力消化道早癌的内镜下切除 , 研究团队进行了严谨的临床研究 。
首先选取部位、大小相匹配的病变 , 同一术者操作 , 分别进行经典透明帽或电动把持钳辅助的内镜下黏膜下剥离术(ESD) , 内镜下切除消化道早癌 , 并比较操作时间、并发症、使用熟练度、辅助效果感受评分等 。 结果显示 , 与传统透明帽辅助相比 , 电动把持钳学习容易 , 培训时间短 , 更加“随心所欲” , 可以自由控制牵引组织的方向、角度、位置 。 同时 , 可以满意暴露黏膜下层 , 显著缩短ESD手术时间 , 及穿孔、出血等并发症的发生率 。 此外 , 由于目标组织提起 , 视野暴露更满意 , 消化道早期肿瘤的完整切除率及整块切除率均上升 , 从而降低肿瘤复发率 。
目前 , 团队已完成产品转化和规模生产力、产业化体系的构建 。 未来 , 该技术有望助力更多的消化内镜医师 , 特别是一些初学者 , 让他们更快掌握ESD技术 。 最终使广大患者获得更加微创、彻底的治疗 。
自己用的工具可以自己雕琢
□北京大学第三医院消化科副主任 黄永辉
进入21世纪后 , 微创、超级微创治疗已成为医学的核心和趋势 。 消化内镜下的诊疗技术 , 在切除病变的同时保留器官结构完整性 , 不影响脏器功能 , 体表无创口 , 手术用时更短 , 患者术后恢复效果更好 , 属于超级微创治疗 。
- 平安|医疗服务专业精准科技创新赋能基层——平安健康(检测)中心亮相第二届世界大健康博览会
- 医保|6个创新4个着力点,打造以信用管理为基础的医保基金监管新格局
- 界面新闻|俞敏洪谈新东方不足:坚持不够、创新不够、人才不够重视
- 澎湃新闻|河北:规划建设雄安“科技自由港” 布局一批国家级创新平台
- 微店|阳泉农商银行创新线上获客模式推出“金融微店”
- 期汇金|周幺成 11.17 黄金日内震荡行情,晚间走势操作建议
- 中国首富|钟睒睒再成中国首富!农夫山泉股价创新高,与“绿发会”打官司
- 操作|常做两个动作,帮你疏肝理气!
- 中国文化|内容为王、创新传播 国产影视如何“出海”又“出圈”?
- 驾驶证,行政拘留|什么操作?人在狱中竟能考下驾照?原来他是找“黄师傅”花钱买的