创立一年多便落地L4场景,这家公司凭什么将无人驾驶带进现实?( 二 )
首先环境模拟 。 天气是影响传感器感知的一个重要因素 , 仿真系统可以通过调节云层阴影、光照变化、雨雪量等来测试不同气候条件对传感器影响 。
其次路况模拟 。 汽车停车、变道、超车 , 行人过马路、雨天打伞等复杂情况都可在仿真器中重建 。
比如在仿真环境中汽车行驶至路口 , 工程师可以通过编码在路口放两个欲走不走的行人 , 测试汽车是否能正常通过 , 如果不能便根据发现的问题做方案迭代 。 顺利通过之后 , 可以将环境调整的更复杂 , 比如车道更窄 , 更多不守规矩的车辆和行人等继续测试 。
相比实际路测的里程限制 , 仿真测试只需要一台电脑和GPU便能24小时工作 , 路测里程大概1000倍于实际里程 , 成本仅有路测成本的1% 。
并且 , 实际路测遇到极端情况是小概率事件 , 且不安全 , 而仿真系统可以模拟众多极端情况 , 保证在实际路测前有充分验证 。
此外 , 开发自动驾驶软件时 , 每一天都存在大量代码更迭 , 不同版本代码优劣性也很难通过实际路测比较 , 未来在评估软件是否达到量产水平时 , 仿真会是主要的测试评价技术 。
回看业界 , 特斯拉算是一个异类 , 从低等级自动驾驶做起 , 实打实的通过几十万辆车收集路测数据 , 而从高等级自动驾驶做起的Waymo一直将仿真作为研发的一部分 。
国内厂家在走过了之前的技术路程后 , 也意识到要将自动驾驶带进现实不能没有仿真测试 。 所以今年不少大厂都推出了自己的仿真测试软件 。
从Waymo走出的轻舟智航也正是将仿真测试作为自己的核心能力 , 其联合创始人、COO汪堃硕士毕业于北大 , 曾于Waymo仿真团队负责仿真系统和系统架构 , 他2013年在Google中国实习 , 2014年入职Google , 是直接从Google中国进入Waymo的第一人 。
其余三位联合创始人于骞、侯聪、大方也都出身于清北 , 后供职于Waymo , 在Waymo相识决定创业 。
二 真正能用起来的仿真
虽然已经有很多公司都意识到了仿真测试的重要性 , 但在汪堃看来 , 国内的仿真测试还属于刚刚起步的阶段 , 经验不丰富 , 技术并不成熟 。
比如 , 很多厂家将重点放在了「真」 , 用游戏引擎、AR等技术渲染出非常漂亮、真实的虚拟城市 , 但实际上环境的真实与否对感知、测试效果的提升是很有限的 。
并且基于游戏引擎开发的仿真器会消耗大量额外计算资源做图像渲染 , 成本高 , 不利于大规模应用 。
最重要的是 , 仿真系统除了要提供虚拟环境测试车辆性能外 , 还要能准确重复真实路测场景中遇见的问题 , 回放当时的数据 , 验证问题是否已经解决 , 用专业名词来说就是要有「确定性」 。
但是 , 基于游戏引擎等第三方软件开发的仿真器是与自动驾驶软件开发相互独立的 , 数据并不相通 , 很难保证各个模块的确定性 。
也就是说 , 测试归测试 , 驾驶归驾驶 , 如果我在行驶过程中出了事故 , 并不能保证改进后的软件不犯同样的错误 。
这些也正是轻舟智航仿真系统的独特之处 。
首先 , 界面很简单 , 抛弃了复杂的渲染工作 , 仅保留了感知结果 , 包括3D Box和雷达点的叠加 。 用比较轻的技术模式减少成本 。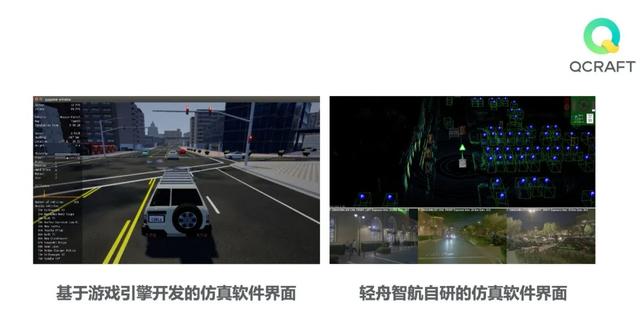 文章插图
文章插图
其次 , 轻舟智航的仿真架构系统是全模块的 , 分为5层:
底部是自研的Car OS , 这是一个底层通讯系统 , 能保证各个模块之间的高效通讯;上一层是核心仿真器及评估器 , 值得注意的是 , 仿真评估器是基于Car OS的接口开发的 , 这就能使仿真测试系统与自动驾驶系统互通 。
一旦系统互通 , 除了能够保证确定性外 , 还可以将测试应用于日常其他技术模块的开发流程中 。 「我们一开始就将仿真测试平台作为关键核心能力 , 与其他模块一同建设起来 , 使开发达到了十分高效的状态 。 」于骞说 。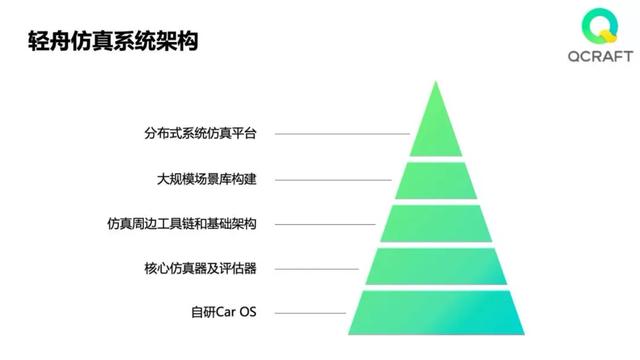 文章插图
文章插图
仿真评估器可以分为5类:安全评估、真值评估、法规评估、舒适度评估、状况评估 。
仿真器上一层是仿真周边工具链和基础架构 , 可保证整个数据闭环的有效性;第四层是大规模场景库构建;最顶层则是分布式系统仿真平台 , 支持快速、大规模的仿真应用 , 在短时间内得出正确评估 。
三 渐进的落地模式 , 从无人小巴开始
依据核心仿真测试技术 , 成立不久的轻舟智航已经在苏州示范运营L4自动驾驶方案无人小巴Robo-Bus 。
- 体验|闭上眼睛点外卖是什么感觉?时隔一年再次体验,进步令人欣慰
- 张大|2020年财务公布:张大仙一年收入负1400W?活该是一姐
- 智能手机品|越南手机悄然崛起!创立短短2年时间,在当地接连击退苹果、小米
- 曾宣称永久免费 360浏览器推出VIP会员功能:一年99.9元
- 一年赚3个亿,火锅市场隐形冠军盒马火锅不到1个月打败海底捞?
- 一天不玩手机VS一年不啪啪啪,你选谁?
- 中国另类的支付巨头:完美避开微信、支付宝,一年交易额超3万亿
- 蔚来否极泰来,一年暴涨580%,李斌撕下“最惨”标签
- 中国“胆机之父”出手,推出网红“蓝牙音箱”,一年卖出百万台
- 特写 | 中国纯电动车一年卖1000万辆?专家为新能源车指路