2020中国自动驾驶仿真蓝皮书( 二 )
1.3 仿真测试与道路测试结合推动自动驾驶研发
在自动驾驶的开发流程中 , 纯模型仿真—软件在环仿真—半实物仿真—封闭场地道路测试—开放道路测试的开发流程是最经济、高效的开发流程 。
目前自动驾驶仿真已经被行业广泛接受 。 例如美国自动驾驶领军企业 Waymo 旗下的仿真平台 Carcraft 每天150 亿英里 , 相比之下 , 去年 6 月的数据是 100 亿英里 。 除 Waymo 外 , 通用旗下的 Cruise、AutoX、小马智行等国内外自动驾驶解决方案商也在进行大量的仿真测试 , 以完善自己的自动驾驶系统 , 仿真测试已经成为自动驾驶商用最重要的测试 。
在仿真场景中 , 普通场景下的自动驾驶算法已经比较完善 , 突破难点在于一些极端场景(corner cases) 。 由于极端场景在现实中可遇不可求 , 利用仿真平台可以便捷生成 , 所以业界共识是加大仿真测试在自动驾驶测试中的占比 。 目前自动驾驶算法测试大约 90% 通过仿真平台完成 , 9% 在测试场完成 , 1% 通过实际路测完成 。 仿真测试结果可以在封闭场地进行测试认证 , 此外在道路测试基础上总结出危险场景 , 反馈到仿真测试与封闭场地测试中 , 最终形成评价结果 , 逐步完善评价准则和测试场景库 , 实现了仿真测试、封闭场地测试、道路测试的测试闭环 , 推动技术迭代升级 。
随着仿真技术水平的提高和应用的普及 , 行业旨在达到通过仿真平台完成 99.9%的测试量 , 封闭场地测试完成0.09% , 最后 0.01%到实路上去完成 , 这样可以使自动驾驶汽车研发达到更高效、经济的状态 。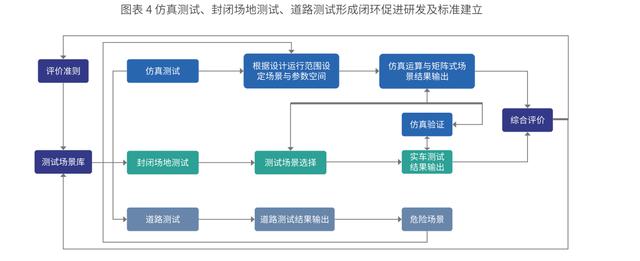 文章插图
文章插图
第二章、国内外自动驾驶仿真测试发展现状2.1 政策法规现状
在世界范围内 , 众多国家针对自动驾驶及相关功能有着不同的政策策略及法规专注度 。 欧盟认为以协作、网联、自动为特征的出行模式是未来的交通系统发展趋势 , 但在智能网联汽车整体策略上态度相对保守 。 美国发展智能网联汽车拥有雄厚的产业优势 , 参与自动驾驶研发的企业涵盖芯片技术、算法开发、系统集成、电信运营、仿真测试、电子设备、整车制造及信息服务等领域 , 且全部为本土及国际高精尖企业及研究机构 。 日本方面 , 政府非常重视智能网联汽车的研发与应用 , 并认为加快L3、L4级别自动驾驶汽车的研发需要国家级场景库协助日本主导国际话语权 。
各国与地区在仿真测试技术路线上都形成了跨领域、跨行业的合作共赢模式 。 欧盟大力推进各成员国、各企业机构之间的协调统一、成果共享;美国与日本企业组建跨国、跨行业联盟 , 发挥各自优势并分担研发成本 。 我国智能网联仿真测试产业发展迅速 , 技术创新活跃 , 产业规模不断扩大 , 但也存在顶层设计欠缺、部分关键技术缺失、标准法规滞后等问题 。 我国拥有全球最大汽车市场 , 强大的信息通信产业以及完备的计算机科学人才等良好基础 , 积极扩充合作和行业联盟有助于跟上国际合作潮流 。
随着自动驾驶技术的发展 , 具备自动驾驶功能的汽车已经逐渐成为研发热点 , 世界各国均针对自动驾驶制定了相应战略方针 , 系统安全性是当前国际法规研究的重点 。 在联合国层面 , 世界车辆法规协调论坛 WP.29 成立了自动驾驶汽车工作组(GRVA) , 该工作组正在进行自动驾驶相关安全法规的制定 。 在 GRVA 子工作组 VMAD 自动驾驶安全验证方法中 , 形成了以道路测试、场地测试、仿真测试、审核与验证、交通场景等为支撑的“多支柱验证方法” , 仿真及虚拟测试逐渐成为被国际认可的自动驾驶功能验证中必不可少的一环 。 2020 年中国作为联合主席成员国 , 参与起草 GRVA 子工作组 FRAV《自动驾驶车辆的通用功能性要求》草案 , 此草案从系统安全、设计运行域、故障保护响应、目标事件检测和响应、人机交互界面及操作员信息等方面提出了对自动驾驶功能安全的要求 。
2020年6月 , WP.29世界车辆法规协调论坛通过了世界上首个针对Level 3级自动驾驶车辆有约束力的法规——UN Regulation on Automated Lane Keeping Systems(ALKS) , 此条款从 2021 年 1 月正式开始生效 。 此条款规定了自动驾驶车辆开启自动车道保持功能的具体需求、移交条件及干预条件 , 其中重点约束了车载显示器、人机交互条件、与驾驶员车辆控制权移交、驾驶员没有做出正确判断后的系统退出机制等 。 牵头此草案的国家为日本和德国 , 通过此条款后 , 日本、法国、荷兰以及加拿大等国已经确立了此草案与当地法规的生效关系 , 英国同样承诺在预设的 300 英里公开测试道路上及相关区域进行相应测试 。
- 空调|让格力、海尔都担忧,中国取暖“新潮物”强势来袭,空调将成闲置品?
- 国外|坐拥77件专利,打破国外的垄断,造出中国最先进的家电芯片
- 手机基带|为了5G降低4G网速?中国移动回应来了:罪魁祸首不是运营商
- 通气会|12月4~6日,2020中国信息通信大会将在成都举行
- 程序|2020全景生态流量秋季大报告:TOP100APP超半数布局小程序,全景流量重塑行业竞争新格局
- 中国|浅谈5G移动通信技术的前世和今生
- 自动|碳博士控股子公司推出最新款自动驾驶清扫车
- 时尚先生|小米雷军成2020年最出圈企业家:获时尚双刊年度人物
- 网络覆盖|爱立信:2020年底,将有超过10亿人口获得5G网络覆盖
- 垫底|5G用户突破2亿:联通垫底,电信月增700万,中国移动有多少?