2020中国自动驾驶仿真蓝皮书( 五 )
Cruise 利用仿真系统(Matrix)与路测结合 , 重点突破车辆表现欠佳区域及危险场景 。 Cruise 自动驾驶仿真具备以下四个特点 :第一 , 能对路测过程中车辆表现欠佳的区域 , 在仿真器中复现这段路线以提升自动驾驶软件的性能 。 第二 , 可以在仿真器中复现危险场景 , 如无保护左转、不遵守交通规则的行人及车辆等 , 验证自动驾驶汽车的应变能力 。 第三 , 能通过不断地训练让仿真器成为新的数据机 , 用仿真数据反哺路测工作 。 第四 , 仿真器既能保障乘客安全 , 也能兼顾舒适性 。 据 Cruise 介绍 , 其每天能完成 3 万次仿真测试 。
小马智行实行软件快速迭代升级的自动驾驶仿真方式 。 新开发功能或者 bug 修复后 , 首先会在仿真系统进行模拟测试 , 测试完成后进行场地测试或者路测 , 如果测试结果不符合预期重新进行代码修改 。 如果测试结果符合预期 , 通常在一天内可以完成测试 , 然后每周会同步到所有测试车辆 , 并且每个工程师可单独、并行执行 , 保证了自动驾驶开发的快速迭代升级 。 小马智行仿真系统测试场景通过两种方式建立 。 第一 , 通过路测获得所有重要的场景并数字化处理收入场景库 , 后续所有代码的改动都会重新测试所有的重要场景 。 第二 , 由于现实中场景收集的局限性 , 仿真系统还可以创造一些场景 。
AutoX 通过自动驾驶车辆与仿真大数据云平台协同 , 驱动自动驾驶落地 。 AutoX 拥有一支 RoboTaxi 自动驾驶乘用车队 , 搭载 AutoX 硬件系统 , 每天收集真实世界的海量数据 。 仿真大数据云平台通过对车队收集的真实世界海量测试运营数据进行数据加工和压缩、质量监督、自动标注、结构化测试 , 并通过仿真平台以 ×1000 倍量级对真实路采数据进行混合仿真 , 生产出更大量级、更高难度的虚实混合仿真数据 。 由此 , AutoX 打造了可拓展、可衡量的分布式仿真平台 , 并且支持大规模手工和自动场景的产生 。
2.3.4 仿真软件企业
仿真软件企业可分为传统仿真软件企业、初创企业两大类(见图表 13) 。 传统仿真软件企业由于技术积累比较深厚 , 进入自动驾驶仿真具有先天优势 , 而且合作伙伴较多 , 二次开发具有优势 。 初创企业由于起步晚 , 技术积累较弱 , 国内企业和国外的差距较大 , 但依靠雄厚的资金和人才集聚力 , 创业公司在自动驾驶仿真软件研发方面有望迅速崛起 。
在全球主流自动驾驶仿真软件企业中 , 美国和德国占据全球企业总数一半以上 。 通过图表 13 可以发现 , 在 22家仿真软件企业中 , 有8家来自美国 , 占总数的36% , 显示了美国在自动驾驶领域的世界领先地位 。 来自德国有7家占总数的 32% , 主要是德国在传统仿真软件领域的坚实基础促进了自动驾驶仿真的发展 。 中国有 3 家自动驾驶仿真软件初创企业 , 但在汽车传统仿真领域存在短板 , 在自动驾驶仿真方面积累薄弱 , 创新性不足 。
2.3.5 高校及科研机构
高校及科研机构主要应用自动驾驶仿真软件进行前瞻性、基础性研究 , 但很难形成成熟的商业化产品 。 国内从事自动驾驶仿真研究的高校及科研机构主要包括:清华大学、同济大学、北京航空航天大学、吉林大学、天津大学、长安大学、南京航空航天大学、武汉理工大学等 。
武汉理工大学开发的仿真测试平台 , 可以实现HIL、路径规划及跟踪测试、高速场景下的高速编队自动驾驶技术 , 并且实现了仿真场景构建、自动驾驶传感器性能及算法评价 , 为自动驾驶的量产评价提供指导 。
吉林大学在基于场景的自动驾驶虚拟仿真测试体系方面 , 应用 Panosim 仿真平台实现了车辆及动力学模型、静态虚拟场景、动态虚拟场景、模拟环境传感、智能驾驶系统等的仿真 , 形成了完整的自动驾驶汽车虚拟仿真测试环境 。
在国外 , 西班牙巴塞罗那自治大学、德国国家宇航中心开发的自动驾驶仿真软件已经得到应用 。 西班牙巴塞罗那自治大学开发的 CARLA , 支持传感器、环境状态、动静态交通参与者、地图的灵活配置;德国国家宇航中心开发的自动驾驶仿真开源平台 SUMO , 支持微观连续交通流仿真 , 可自动生成道路网络 , 也可外接其他交通模拟器 , 如Vissim 。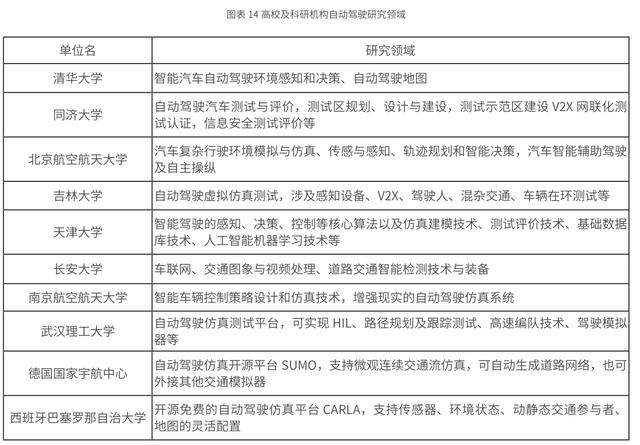 文章插图
文章插图
2.3.6 智能网联测试示范区
智能网联测试示范区建设已形成一定规模 。 目前全国有 10 余家国家级和数家省级智能网联测试示范区 , 主要通过对 5G、V2X 车路协同、模拟仿真、车联网等新技术的部署和应用 , 为自动驾驶、网联通信供应商等提供系统测试服务 , 推动汽车、信息通信、道路设施等内容的综合标准体系的建立 。
- 空调|让格力、海尔都担忧,中国取暖“新潮物”强势来袭,空调将成闲置品?
- 国外|坐拥77件专利,打破国外的垄断,造出中国最先进的家电芯片
- 手机基带|为了5G降低4G网速?中国移动回应来了:罪魁祸首不是运营商
- 通气会|12月4~6日,2020中国信息通信大会将在成都举行
- 程序|2020全景生态流量秋季大报告:TOP100APP超半数布局小程序,全景流量重塑行业竞争新格局
- 中国|浅谈5G移动通信技术的前世和今生
- 自动|碳博士控股子公司推出最新款自动驾驶清扫车
- 时尚先生|小米雷军成2020年最出圈企业家:获时尚双刊年度人物
- 网络覆盖|爱立信:2020年底,将有超过10亿人口获得5G网络覆盖
- 垫底|5G用户突破2亿:联通垫底,电信月增700万,中国移动有多少?